| Version 9 (modified by , 3 years ago) ( diff ) |
|---|
Load the nodes with images:
omf load -i abhiadhikari-node-mob4-3.sb1.cosmos-lab.org-2023-10-27-21-13-48.ndz -t mob4-2 omf load -i abhiadhikari-node-mob4-2.sb1.cosmos-lab.org-2023-10-27-20-40-46.ndz -t mob4-1
mob4-1 is the transmitter, and mob4-2 is the receiver.
Within the console, make sure the PAAMs are activated properly:
mob4-1:
curl "http://rfdev-mob4-1.sb1.cosmos-lab.org:3000/array_mgmt/connect?dev_name=Local&ics=all&num_elements=16&txrx=tx&pol=h&theta=0&phi=0" curl "http://rfdev-mob4-1.sb1.cosmos-lab.org:3000/array_mgmt/enable?dev_name=Local&ics=all&num_elements=16&txrx=tx&pol=h&theta=0&phi=0" curl "http://rfdev-mob4-1.sb1.cosmos-lab.org:3000/array_mgmt/steer?dev_name=Local&theta=0&phi=0"
mob4-2:
curl "http://rfdev-mob4-2.sb1.cosmos-lab.org:3000/array_mgmt/connect?dev_name=Local&ics=all&num_elements=16&txrx=rx&pol=h&theta=0&phi=0" curl "http://rfdev-mob4-2.sb1.cosmos-lab.org:3000/array_mgmt/enable?dev_name=Local&ics=all&num_elements=16&txrx=rx&pol=h&theta=0&phi=0" curl "http://rfdev-mob4-2.sb1.cosmos-lab.org:3000/array_mgmt/steer?dev_name=Local&theta=0&phi=0"
Now create two terminals. Terminal 1 will be used for mob4-1. Terminal 2 will be used for mob4-2.
Within Terminal 1, run:
ssh -Y root@mob4-1 gnuradio-companion
Within Terminal 2, run:
ssh -Y root@mob4-2 gnuradio-companion
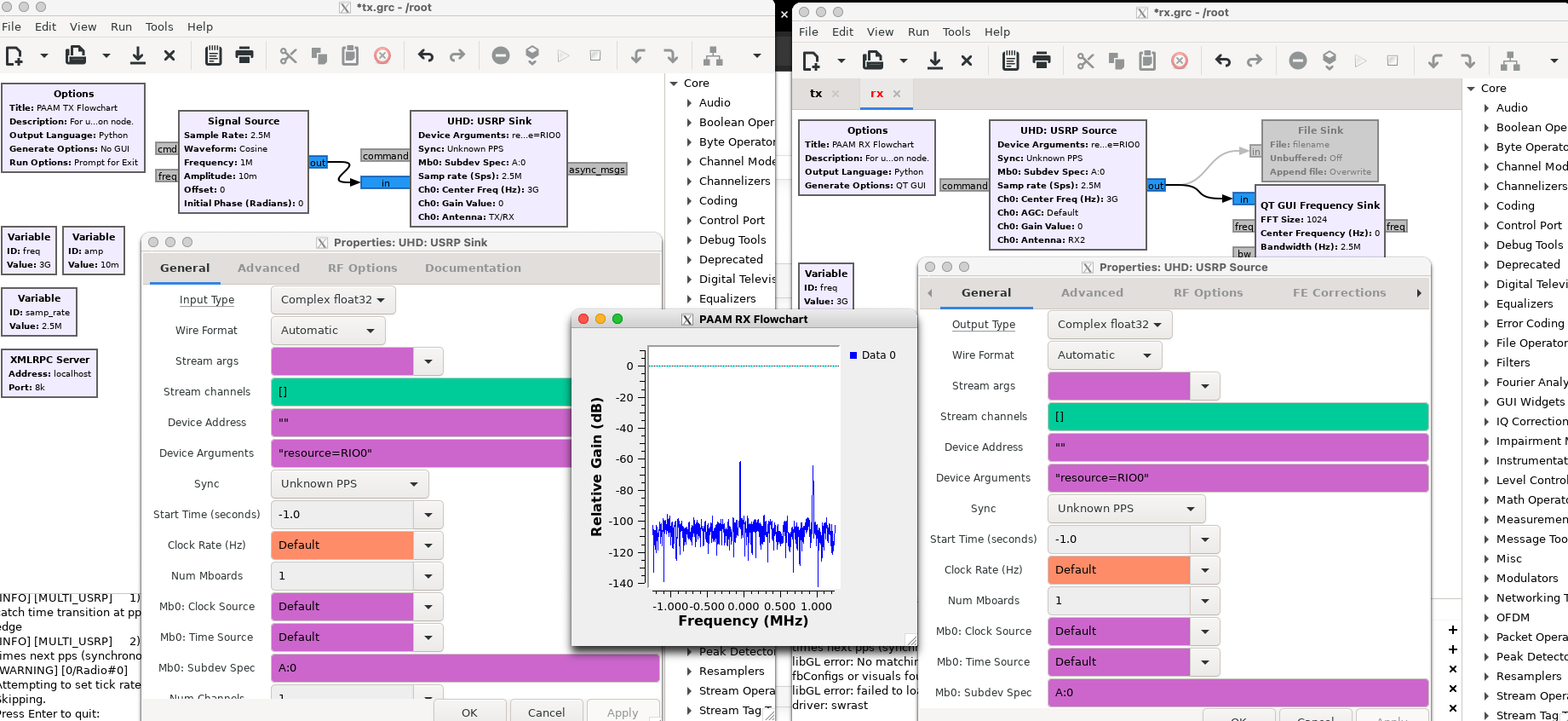
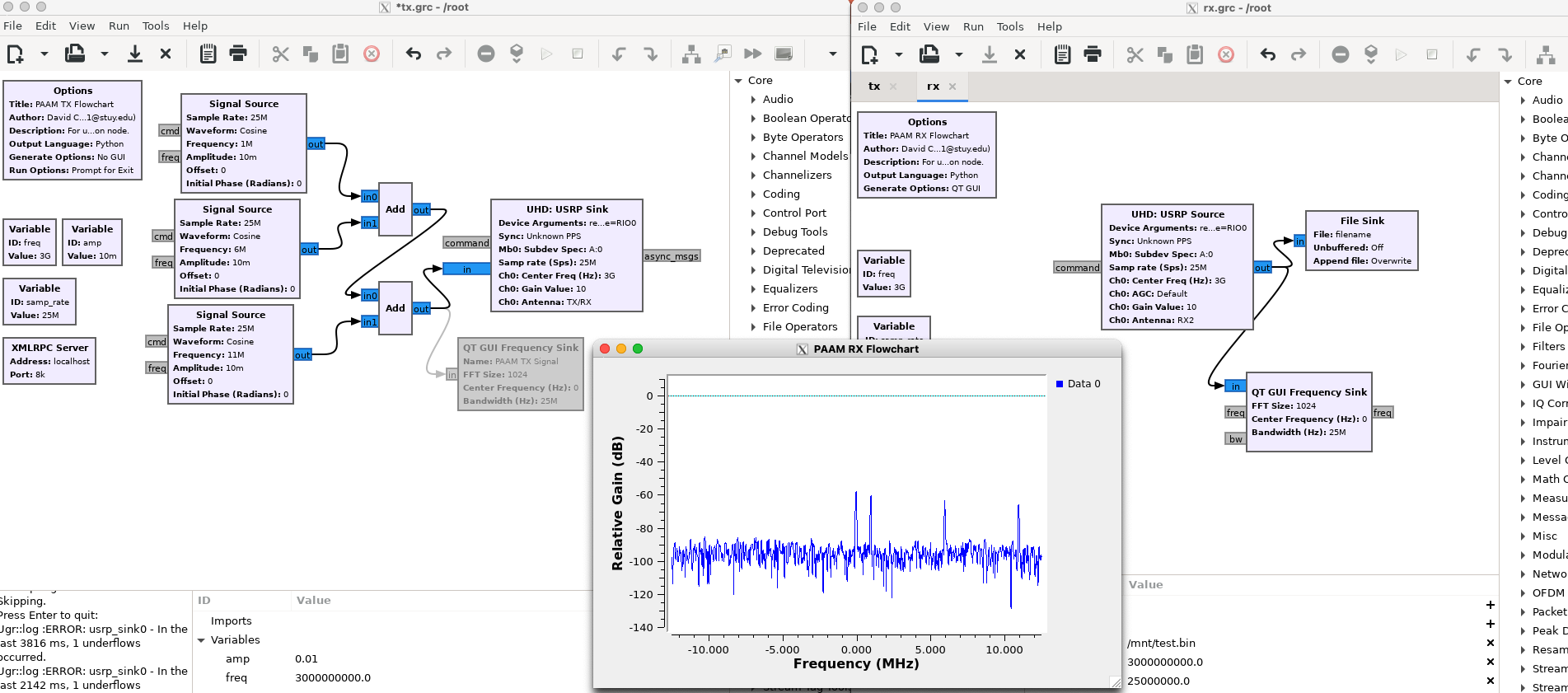
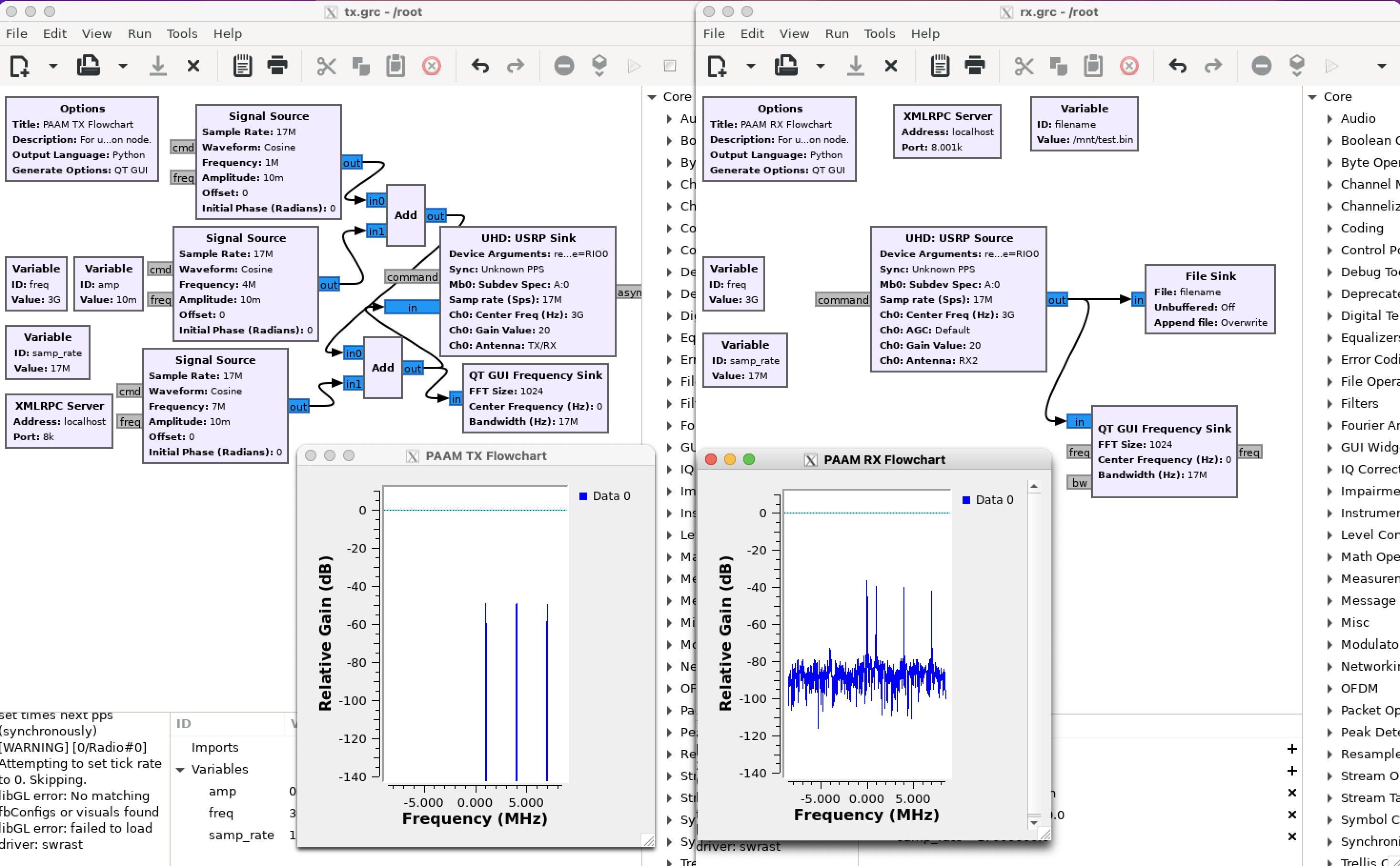
Run /root/tx.grc and /root/rx.grc in Terminal 1 and Terminal 2, respectively. Obtain the frequency plot shown below.

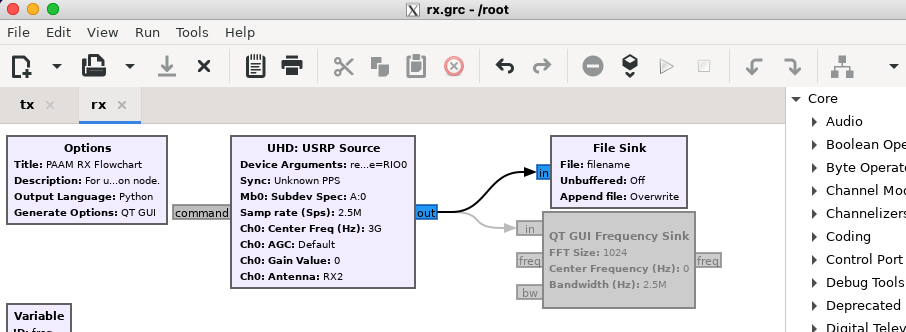
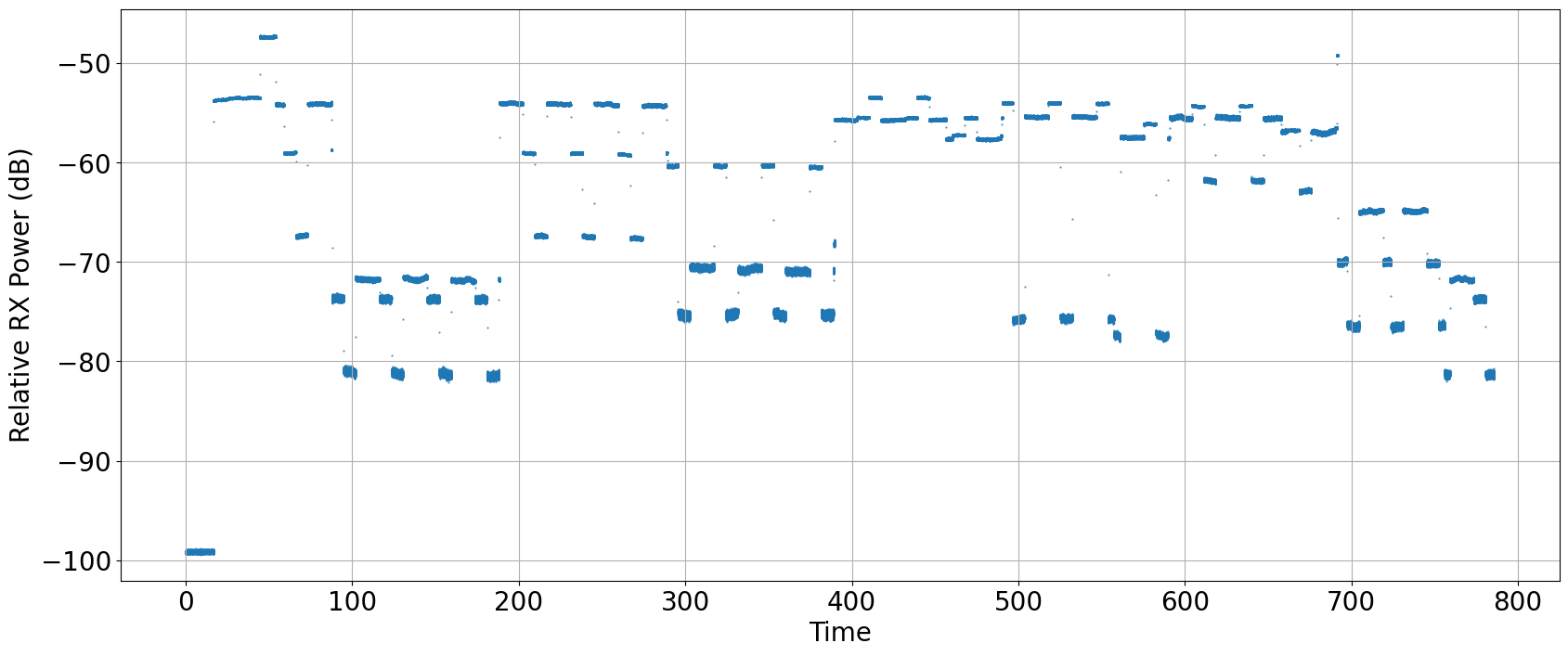
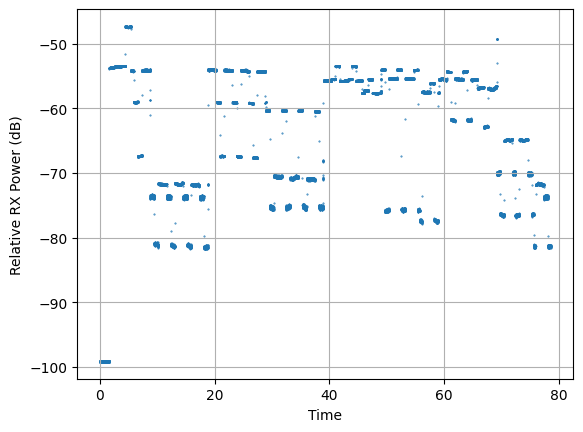
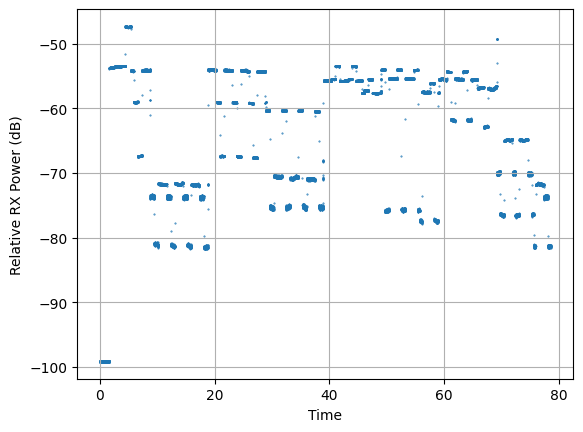
Now, we will run the beam-steering scripts being used for the NRDZ project. Using gnuradio-companion in Terminal 2, make sure the file sink is enabled for /root/rx.grc.
 .
.
Make sure to start the receiver first! Terminal 2 in this case
In Terminal 1, run:
root@mob4-1:~/rest# ./tx-rest.py
Terminal 1 output:
3x3 TRIALS: [(-10, 0), (0, 0), (10, 0)]
Estimated Experiment Time: 1.75 minutes (105 seconds)
Press enter to confirm experiment execution.
http://rfdev-mob4-2.sb1.cosmos-lab.org:3000/array_mgmt/connect?dev_name=Local&txrx=tx&pol=h&ics=all&num_elements=4&verify=False 200 <?xml version="1.0" encoding="UTF-8"?>
<response status="OK">
<action service="array_mgmt" name="connect" ipaddr="Local">
<ERROR detail=" Array is already connected" />
</action>
</response>
Warm-up for 15 seconds...
[INFO] [UHD] linux; GNU C++ version 9.3.0; Boost_107100; UHD_4.1.0.4-release
[INFO] [X300] X300 initialization sequence...
[INFO] [X300] Connecting to niusrpriorpc at localhost:5444...
[INFO] [X300] Using LVBITX bitfile /usr/share/uhd/images/usrp_x310_fpga_HG.lvbitx
[INFO] [GPS] Found an internal GPSDO: LC_XO, Firmware Rev 0.929a
[INFO] [X300] Radio 1x clock: 200 MHz
[WARNING] [MULTI_USRP] Calling multi_usrp::recv_async_msg() is deprecated and can lead to unexpected behaviour. Prefer calling tx_stream::recv_async_msg().
[INFO] [MULTI_USRP] 1) catch time transition at pps edge
[INFO] [MULTI_USRP] 2) set times next pps (synchronously)
[WARNING] [0/Radio#0] Attempting to set tick rate to 0. Skipping.
Press Enter to quit: Beginning TX!
TRIALS: [(-10, 0), (0, 0), (10, 0)]
Steering beam to (-10,0), waiting 10 seconds...
Delimiting for 5 seconds
127.0.0.1 - - [05/Dec/2023 22:31:55] "POST /RPC2 HTTP/1.1" 200 -
Setting amplitude to 0.001
127.0.0.1 - - [05/Dec/2023 22:32:00] "POST /RPC2 HTTP/1.1" 200 -
http://rfdev-mob4-2.sb1.cosmos-lab.org:3000/array_mgmt/steer?dev_name=Local&theta=-10&phi=0 200 <?xml version="1.0" encoding="UTF-8"?>
<response status="OK">
<action service="array_mgmt" name="steer" ipaddr="Local">
<step name="steering" duration="0.061728"/>
</action>
</response>
In Terminal 2, run:
**root@mob4-1:~/rest# ./tx-rest.py**
Terminal 2 output:
3x3 TRIALS: [(-10, 0), (0, 0), (10, 0)]
Estimated Experiment Time: 1.75 minutes (105 seconds)
Press enter to confirm experiment execution.
http://rfdev-mob4-2.sb1.cosmos-lab.org:3000/array_mgmt/connect?dev_name=Local&txrx=tx&pol=h&ics=all&num_elements=4&verify=False 200 <?xml version="1.0" encoding="UTF-8"?>
<response status="OK">
<action service="array_mgmt" name="connect" ipaddr="Local">
<ERROR detail=" Array is already connected" />
</action>
</response>
Warm-up for 15 seconds...
[INFO] [UHD] linux; GNU C++ version 9.3.0; Boost_107100; UHD_4.1.0.4-release
[INFO] [X300] X300 initialization sequence...
[INFO] [X300] Connecting to niusrpriorpc at localhost:5444...
[INFO] [X300] Using LVBITX bitfile /usr/share/uhd/images/usrp_x310_fpga_HG.lvbitx
[INFO] [GPS] Found an internal GPSDO: LC_XO, Firmware Rev 0.929a
[INFO] [X300] Radio 1x clock: 200 MHz
[WARNING] [MULTI_USRP] Calling multi_usrp::recv_async_msg() is deprecated and can lead to unexpected behaviour. Prefer calling tx_stream::recv_async_msg().
[INFO] [MULTI_USRP] 1) catch time transition at pps edge
[INFO] [MULTI_USRP] 2) set times next pps (synchronously)
[WARNING] [0/Radio#0] Attempting to set tick rate to 0. Skipping.
Press Enter to quit: Beginning TX!
TRIALS: [(-10, 0), (0, 0), (10, 0)]
Steering beam to (-10,0), waiting 10 seconds...
Delimiting for 5 seconds
127.0.0.1 - - [05/Dec/2023 22:31:55] "POST /RPC2 HTTP/1.1" 200 -
Setting amplitude to 0.001
127.0.0.1 - - [05/Dec/2023 22:32:00] "POST /RPC2 HTTP/1.1" 200 -
http://rfdev-mob4-2.sb1.cosmos-lab.org:3000/array_mgmt/steer?dev_name=Local&theta=-10&phi=0 200 <?xml version="1.0" encoding="UTF-8"?>
<response status="OK">
<action service="array_mgmt" name="steer" ipaddr="Local">
<step name="steering" duration="0.061728"/>
</action>
</response>
Within tx-rest.py and rx-rest.py, make sure you indicate the correct rfdev corresponding to the mobile node being used.
Attachments (11)
- basic_mobile_tx_rx.png (359.4 KB ) - added by 3 years ago.
- file_sink_on.png (62.3 KB ) - added by 3 years ago.
- sb1_read_GRC_data.ipynb (85.4 KB ) - added by 2 years ago.
- paam_cw_sweep.png (59.9 KB ) - added by 2 years ago.
- mobile_tx_rx.png (263.1 KB ) - added by 2 years ago.
- data_mobile_tx_rx_revised.png (55.5 KB ) - added by 2 years ago.
- mobile_tx_rx_revised.png (656.3 KB ) - added by 2 years ago.
- data_process_mobile_paam.ipynb (79.7 KB ) - added by 2 years ago.
- data_mobile_tx_rx_revised.2.png (22.3 KB ) - added by 2 years ago.
- data_mobile_tx_rx_v2.png (22.3 KB ) - added by 2 years ago.
- NRDZ_experiment_low_resolution.mov (22.6 MB ) - added by 2 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}