| Version 5 (modified by , 5 years ago) ( diff ) |
|---|
Site Navigation
- COSMOS Testbed Overview
- Getting Started
- COSMOS/ORBIT User Guide
- COSMOS Portal
- Account Management
- Portal Dashboard
- Directory
- Disk Images
- Community Forum
- Getting Started with the COSMOS Portal
- SSH Access to Testbed Nodes
- Scheduler
- Testbed Status
- Installing Chrome Remote Desktop (CRD) on a Custom Image
- Tutorials
- Architecture
- Resources, Services and APIs
- Datasets
- Hardware Info
- RF Policies & Compliance
MIMO Channel Sounding
Description
In this tutorial, we demonstrate the TDD 2x2 MIMO channel sounding procedure using the USRP-2974s in the COSMOS Sandbox2 (sb2) and the RENEW Sounder software
- The instructions of the RENEW Platform Sounder software can be found here under RENEW license.
- The COSMOS team contributes to adding the UHD support for the Sounder software under the UHD license.
Author: Tingjun Chen, Columbia University (tc2668[at]columbia.edu)
Last updated: Sept. 21, 2020
Prerequisites
In order to access sb2, create a reservation in sb2 and have it approved by the reservation service. Access to the resources is granted after the reservation is confirmed. Please follow the process shown on the COSMOS getting started page to get started.
Resources Required
- 2 USRP-2974 (
sdr2-s1-lg1andsdr2-md1) - 1 Server (
srv2-lg1)
Tutorial Setup
Follow the steps below to gain access to the sb2 console and set up nodes with appropriate images.
- If you don't have one already, sign up for a COSMOS account
- Create a resource reservation on COSMOS sb2
- Login into sb2 console (
console.sb2.cosmos-lab.org) with two SSH sessions. - Make sure all the nodes and devices used in the experiment are turned off:
omf tell -a offh -t sdr2-s1-lg1,sdr2-md1,srv2-lg1
- Use the
baseline-gr.ndznode image (see here for the list of pre-defined images) with Ubuntu 18.04, UHD 3.15, and gnuradio 3.8. Loadbaseline-gr.ndzon on the server.omf load -i baseline-gr.ndz -t srv2-lg1
- Turn all the required resources on and check the status
omf tell -a on -t sdr2-s1-lg1,sdr2-md1,srv2-lg1
omf stat -t system:topo:allres
sshto the the same server from two terminals, use option -Y for using GUI.[Terminal 1] ssh -Y root@srv2-lg1, [Terminal 2] ssh -Y root@srv2-lg1
Experiment Execution
Find and prepare USRPs and the Sounder software
- The IP addresses for Ethernet Port 1(10G) on
sdr2-s1-lg1andsdr2-md1were hard-coded to10.118.2.2and10.118.3.2respectively. To access them fromsrv2-lg1, configure the network interfaceeno2as follows:root@srv2-lg1:~# ifconfig eno2 10.118.1.2 netmask 255.255.0.0 mtu 9000 up root@srv2-lg1:~# sudo sysctl -w net.core.wmem_max=24862979 net.core.wmem_max = 24862979 root@srv2-lg1:~# sudo sysctl -w net.core.rmem_max=24862979 net.core.rmem_max = 24862979 root@srv2-lg1:~# ifconfig eno2: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 9000 inet 10.118.1.2 netmask 255.255.0.0 broadcast 10.118.255.255 inet6 fe80::9a03:9bff:fe61:9609 prefixlen 64 scopeid 0x20<link> ether 98:03:9b:61:96:09 txqueuelen 1000 (Ethernet) RX packets 4053772 bytes 17770502341 (17.7 GB) RX errors 0 dropped 0 overruns 0 frame 0 TX packets 1727950 bytes 2972166223 (2.9 GB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
- Run
und_find_devicecto make sure that the USRP-2974s can be reached:root@srv2-lg1:~# uhd_find_devices --args="addr=10.118.2.2" [INFO] [UHD] linux; GNU C++ version 7.5.0; Boost_106501; UHD_3.15.0.HEAD-0-gaea0e2de -------------------------------------------------- -- UHD Device 0 -------------------------------------------------- Device Address: serial: 318F20F addr: 10.118.2.2 fpga: XG name: product: NI-2974 type: x300 root@srv2-lg1:~# uhd_find_devices --args="addr=10.118.3.2" [INFO] [UHD] linux; GNU C++ version 7.5.0; Boost_106501; UHD_3.15.0.HEAD-0-gaea0e2de -------------------------------------------------- -- UHD Device 0 -------------------------------------------------- Device Address: serial: 3165747 addr: 10.118.3.2 fpga: XG name: product: X310 type: x300
- Download and build the RENEW Sounder software on the
developbranch at here and follow the instructions to build it. Note that themasterbranch does not have UHD support.
- Include in
files/usrp-bs-serials.txtthe IP address10.118.2.2, i.e., usesdr2-s1-lg1as the base station (BS). Infiles/usrp-bs-only.json, set"channel" : "AB",to enable dual-channel onsdr2-s1-lg1.
- Similarly, in
files/usrp-client-only.json, set"sdr_id" : [ "10.118.3.2" ](i.e., usesdr2-md1as the user) and"channel" : "AB",to enable dual-channel onsdr2-md1.
Execution
Run the experiment
- In the first terminal [Terminal 1], start the client:
root@srv2-lg1:~/git/renew-software/CC/Sounder# ./sounder files/usrp-client-only.json ... ... pinning client thread 0 to core 1 scheduling TX 13 Frames (41.08 ms) in the future! 1 uplink symbols will be sent per frame... Beacon detected at Time 32476200, sync_index: 13100 Start main client txrx loop...
- In the second terminal [Terminal 2], start the BS:
root@srv2-lg1:~/git/renew-software/CC/Sounder# ./sounder files/usrp-bs-only.json ... ... Set HDF5 File to logs/trace-2020-9-21-18-46-29_1x2x2.hdf5 and group to / task thread 0 starts pinning thread 0 to core 1 Recv Thread 0: waiting for release receiver thread 0 has 1 radios Sync BS host and FPGA timestamp... Start BS main recv loop... Saving HDF5, 2000 frames saved. ... ...
Analyze the results
- Once the hdf5 file is recorded (in this case,
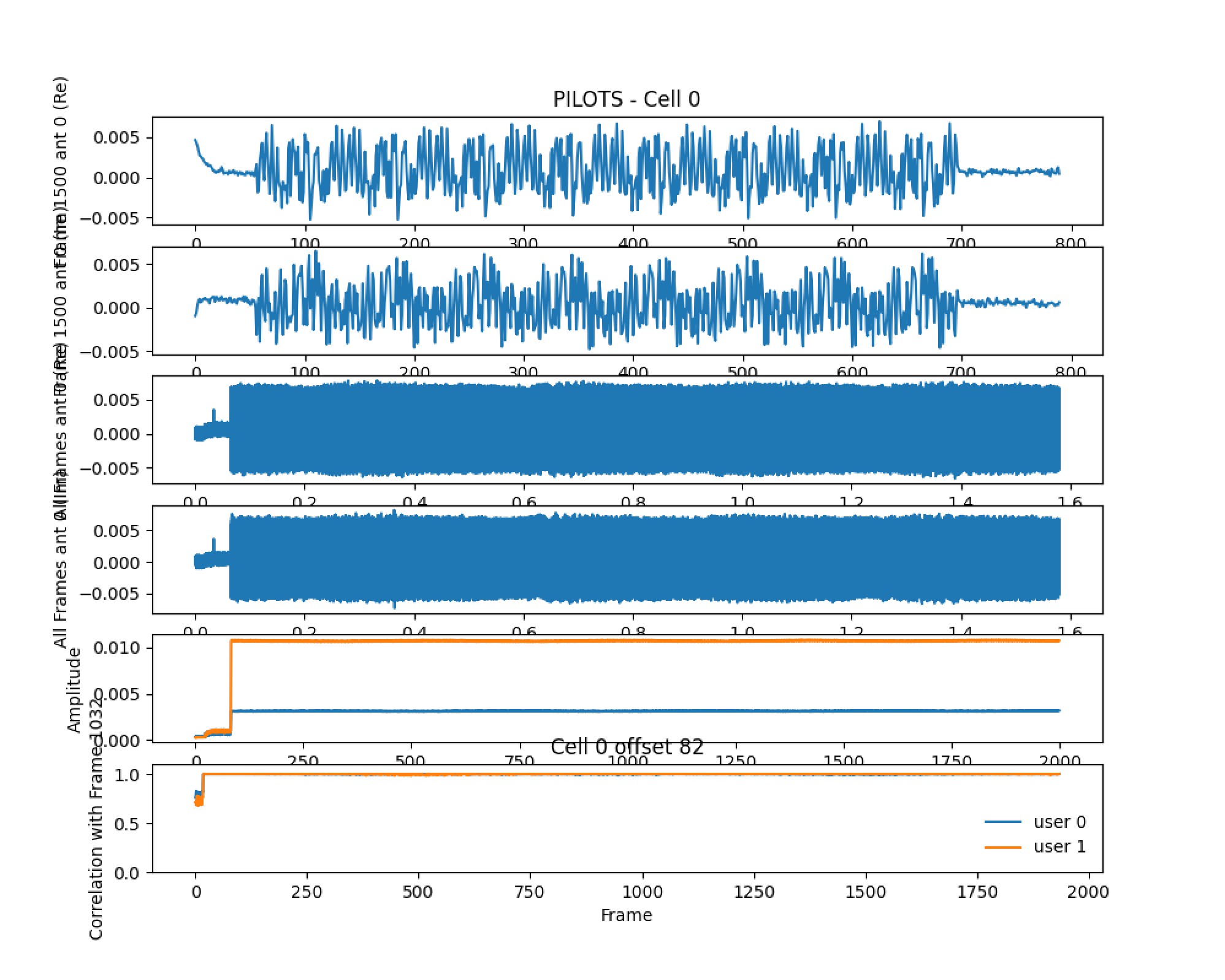
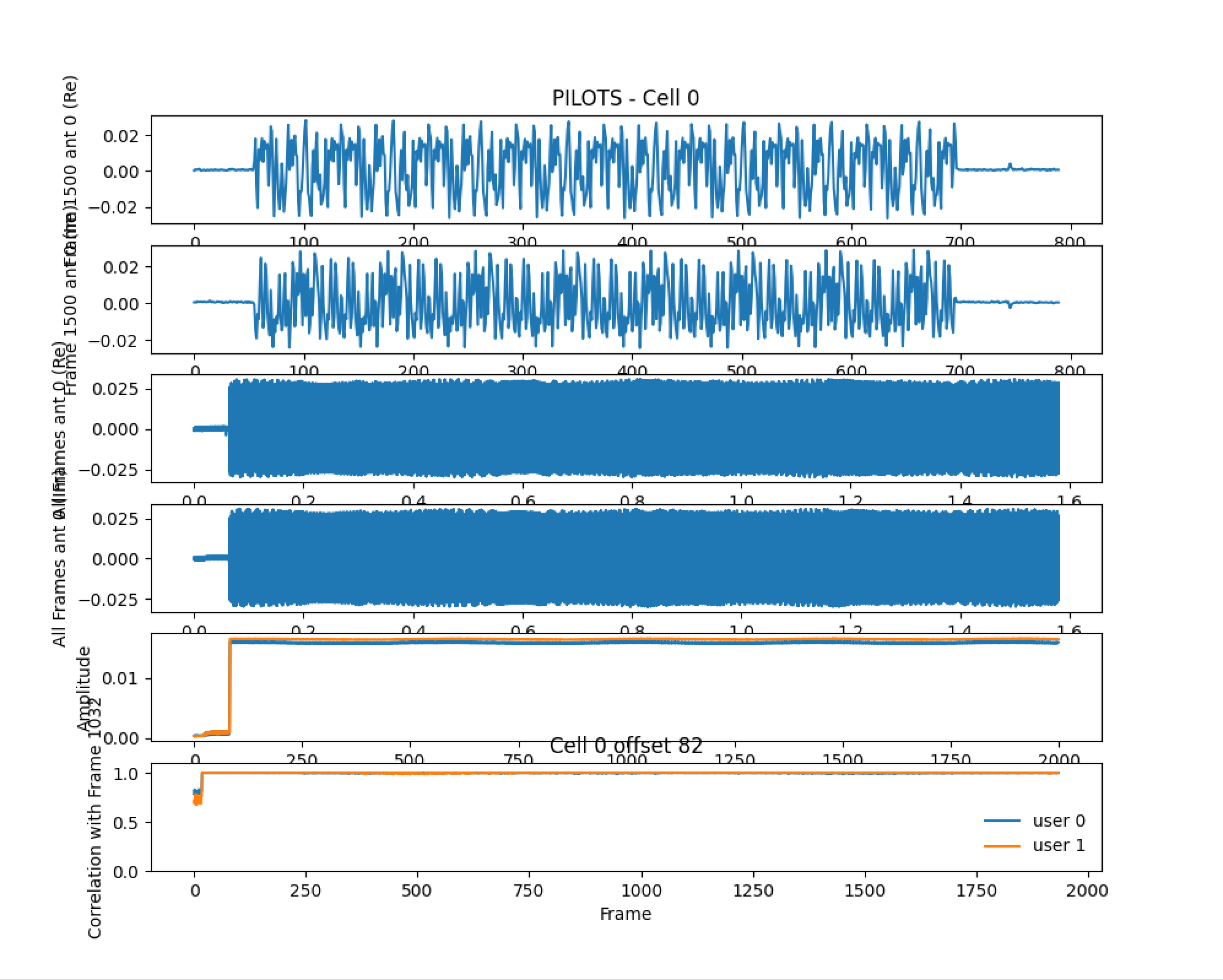
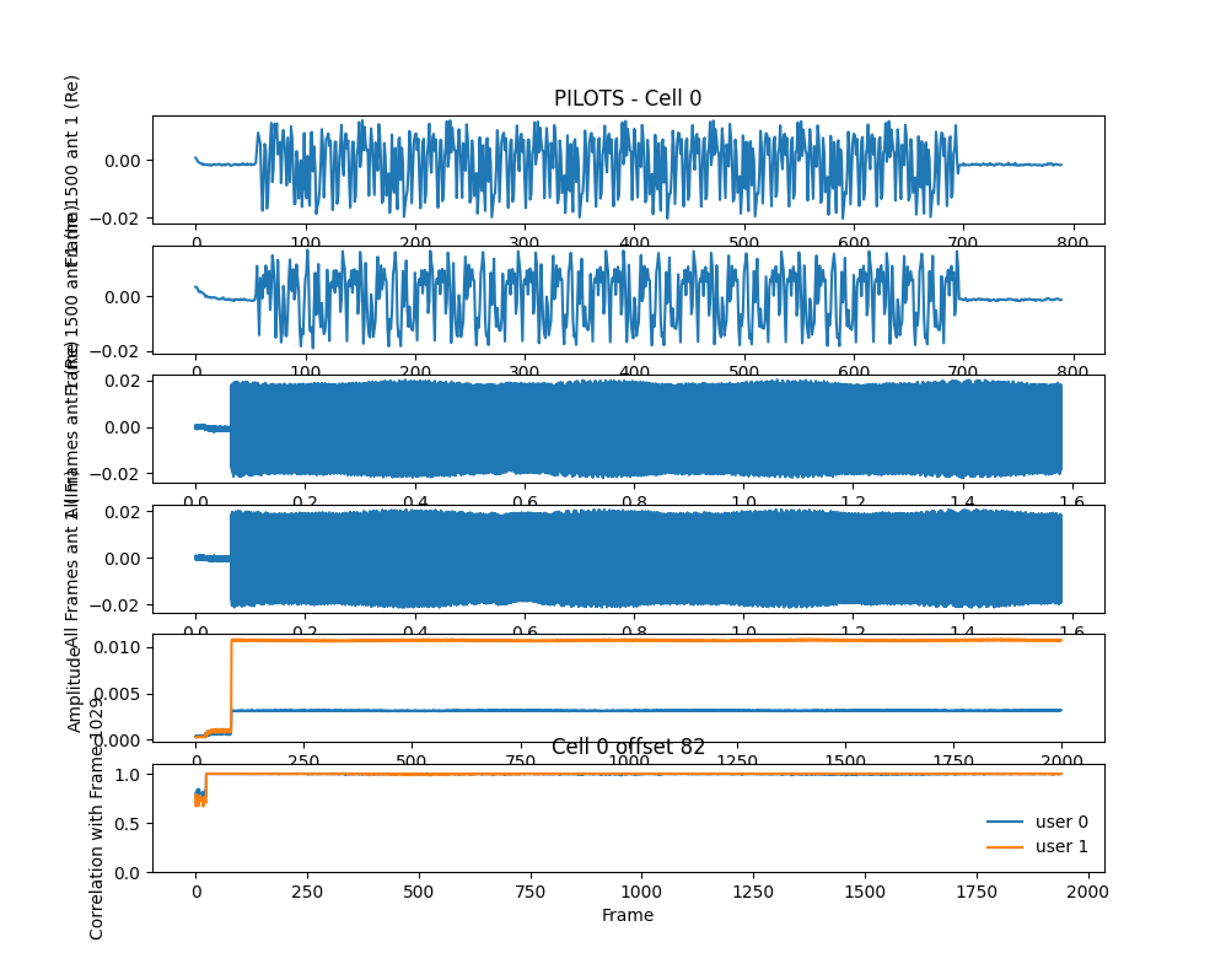
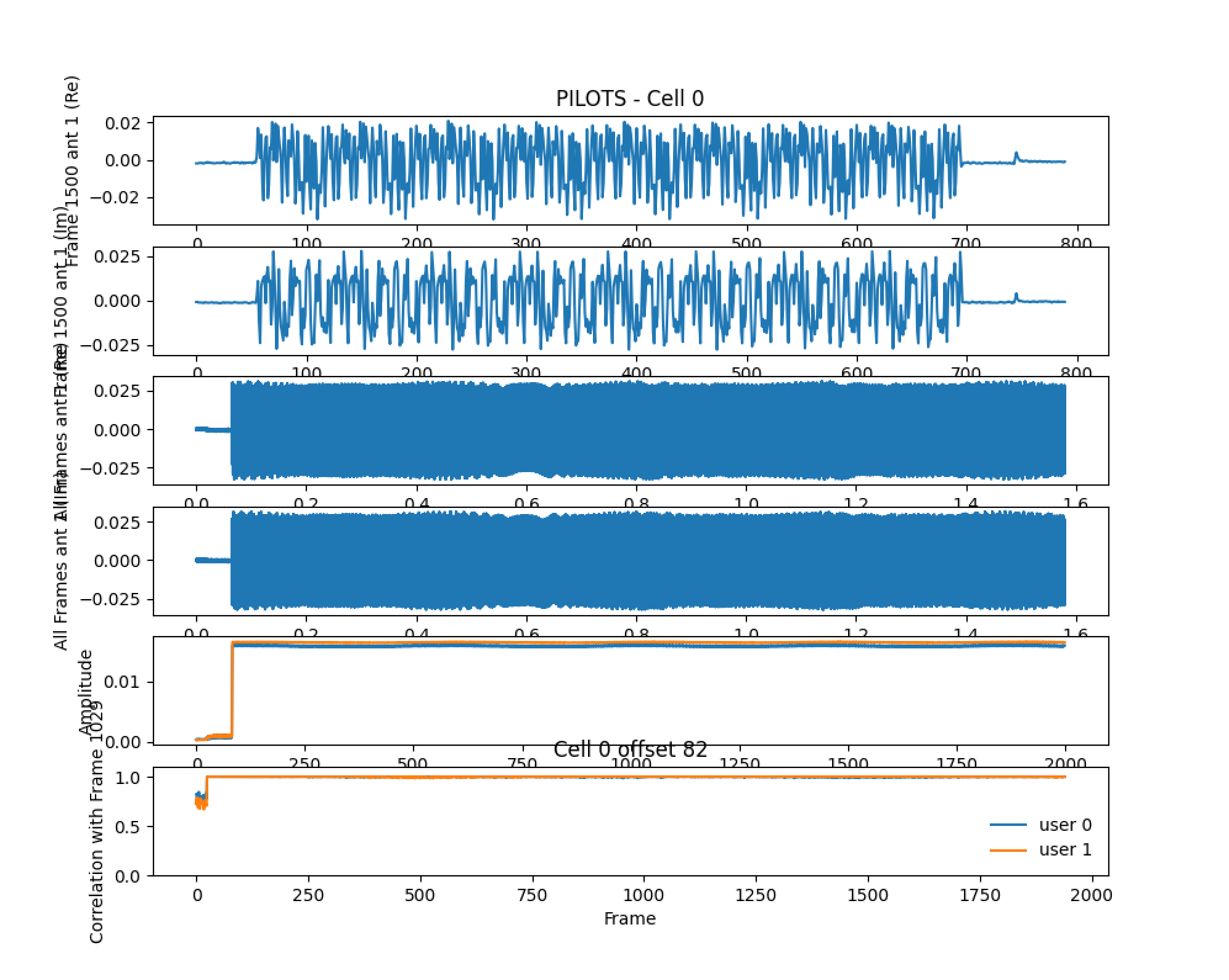
logs/trace-2020-9-21-18-46-29_1x2x2.hdf5), follow the Analyze the HDF5 dataset step here to analyze the results. For example, we can show the pilot sequence for computing the 2x2 channel matrix H = [h00, h01; h10, h11] as follows:root@srv2-lg1:~/git/renew-software/PYTHON/IrisUtils# python3 plot_hdf5.py ../../CC/Sounder/logs/trace-2020-9-21-18-46-29_1x2x2.hdf5 --ref-ant 0 --ref-user 0 --ref-frame 1500
where --ref-ant = 0, 1 represents the BS antenna index, and --ref-user = 0, 1 represents the user index.
 | 
|
 | 
|
Attachments (4)
- MIMOSounding_tutorial_h00.png (334.6 KB ) - added by 6 years ago.
- MIMOSounding_tutorial_h01.png (343.2 KB ) - added by 6 years ago.
- MIMOSounding_tutorial_h10.png (342.1 KB ) - added by 6 years ago.
- MIMOSounding_tutorial_h11.png (343.9 KB ) - added by 6 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip