| Version 1 (modified by , 5 years ago) ( diff ) |
|---|
Site Navigation
- COSMOS Testbed Overview
- Getting Started
- COSMOS/ORBIT User Guide
- COSMOS Portal
- Account Management
- Portal Dashboard
- Directory
- Disk Images
- Community Forum
- Getting Started with the COSMOS Portal
- SSH Access to Testbed Nodes
- Scheduler
- Testbed Status
- Installing Chrome Remote Desktop (CRD) on a Custom Image
- Tutorials
- Architecture
- Resources, Services and APIs
- Datasets
- Hardware Info
- RF Policies & Compliance
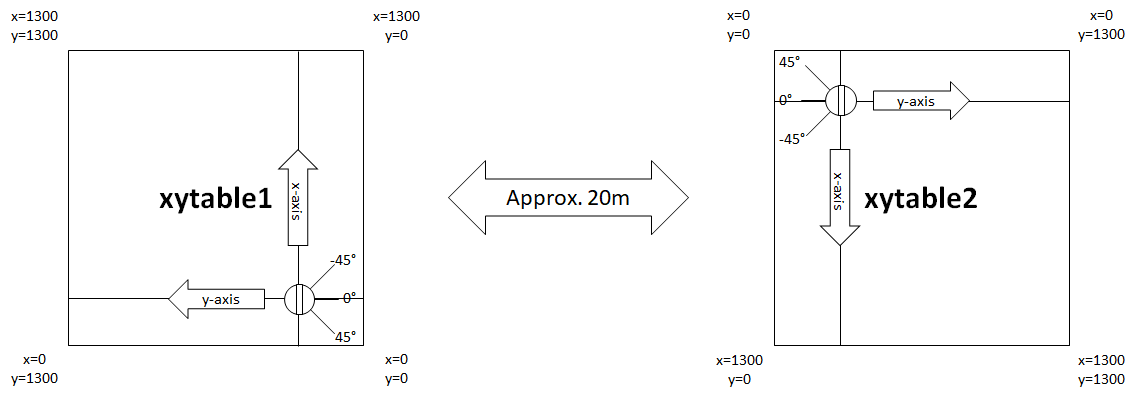
Service: XY Table
This service is used to control the positioning of the Sivers 60GHz antenna arrays mounted on the XY-tables in COSMOS Sandbox 1.
XY Tables:
Name Location Mounted Device xytable1.sb1.cosmos-lab.org COSMOS Sandbox 1 rfdev3-5 xytable2.sb1.cosmos-lab.org COSMOS Sandbox 1 rfdev3-6
Please visit the Sandbox 1 page for more details.
Usage
All the available methods are accessible from the a testbed console via an HTTP API located at am1.cosmos-lab.org:5054/xy_table. This API can be interacted with via a command line tool such as "curl" or any script using a "REST client" library.
Get the Current Status & Positions
This API call is used to get the current status of the XY-table(s). The response will specify the current movement state of the XY platform and angular rotation systems as well as their current and target positions.
HTTP API Path: am1.cosmos-lab.org:5054/xy_table/status
Parameters:
Name Decription Required Acceptable Input name Comma separated list of XY-table FQDNs Y (list of XY table FQDNs)
Selected response values and their meaning:
- xy_status:
Value Decription Idle Platform is stopped in the X and Y plane. Run Platform is moving in the X and/or Y directions. other values Indicate possible error, may require staff intervention if persistent.
- rotator_status:
Value Decription Limp Rotator is stopped but the motor is not trying to hold the position fixed. Holding Rotator is stopped and the motor is trying to hold the position fixed. Accelerating
Travelling
DeceleratingRotator is moving. other values Indicate possible error, may require staff intervention if persistent.
- current_position: The position information at the time the request was issued. Note that this is not real-time and may have up to a 1 second delay.
- target_position: The last requested X, Y, and angle positions.
Example 1
Get status of xytable1.
HTTP Request:
am1.cosmos-lab.org:5054/xy_table/status?name=xytable1.sb1.cosmos-lab.org
Response:
<response status="OK">
<action service="xy_table" name="status">
<xy_table xy_status="Idle" rotator_status="Holding" name="xytable1.sb1.cosmos-lab.org">
<current_position x="650.998" y="0.997" angle="-0.4"/>
<target_position x="650" y="0" angle="0.0"/>
</xy_table>
</action>
</response>
Example 2
Get status of xytable1 and xytable2.
HTTP Request:
am1.cosmos-lab.org:5054/xy_table/status?name=xytable1.sb1.cosmos-lab.org,xytable2.sb1.cosmos-lab.org
Response:
<response status="OK">
<action service="xy_table" name="status">
<xy_table xy_status="Idle" rotator_status="Holding" name="xytable1.sb1.cosmos-lab.org">
<current_position x="650.998" y="0.997" angle="-0.4"/>
<target_position x="650" y="0" angle="0.0"/>
</xy_table>
<xy_table xy_status="Run" rotator_status="Holding" name="xytable2.sb1.cosmos-lab.org">
<current_position x="641.916" y="0.997" angle="0.4"/>
<target_position x="650" y="0" angle="0.0"/>
</xy_table>
</action>
</response>
Move XY Table Platform
Moves the platform(s) to the desired X, Y coordinates and rotates it to the desired angle. The response will be a "status" style response immediately following the execution of the command.
HTTP API Path: am1.cosmos-lab.org:5054/xy_table/move_to
Parameters:
Name Decription Required Acceptable Input name Comma separated list of XY table FQDNs Y (list of XY table FQDNs) x X-axis target coordinate (mm) Y 0 to 1300 y Y-axis target coordinate (mm) Y 0 to 1300 angle Target angle (deg) Y -45 to 45
Example 1
Move the platform of xytable1 to X=500 and Y=30, and rotate to 15 degrees.
HTTP Request:
am1.cosmos-lab.org:5054/xy_table/move_to?name=xytable1.sb1.cosmos-lab.org&x=500&y=30&angle=15
Response:
<response status="OK">
<action service="xy_table" name="move_to">
<xy_table xy_status="Run" rotator_status="Traveling" name="xytable1.sb1.cosmos-lab.org">
<current_position x="650.998" y="0.997" angle="-0.4"/>
<target_position x="500" y="30" angle="15.0"/>
</xy_table>
</action>
</response>
Stop the Current Movement
Immediately cancels the last requested movement and bring the platform(s) to a stop.
HTTP API Path: am1.cosmos-lab.org:5054/xy_table/stop
Parameters:
Name Decription Required Acceptable Input name Comma separated list of XY table FQDNs Y (list of XY table FQDNs)
Example 1
Stop the current movement of xytable1.
HTTP Request:
am1.cosmos-lab.org:5054/xy_table/stop?name=xytable1.sb1.cosmos-lab.org
Response:
<response status="OK">
<action service="xy_table" name="stop">
<xy_table xy_status="Idle" rotator_status="Holding" name="xytable1.sb1.cosmos-lab.org">
<current_position x="650.998" y="0.997" angle="-0.4"/>
</xy_table>
</action>
</response>
Attachments (2)
- xy_overhead_diagram.png (16.2 KB ) - added by 5 years ago.
- xy_table.JPG (1.0 MB ) - added by 5 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip